

如不做特别说明,本文介绍的内容基于规范的21-11版本。
简介
- 初始化/反初始化OS,SchM,BswM以及一些其他基础软件模块
- 当有请求时,配置ECU进入到睡眠或关闭状态
- 管理ECU所有的唤醒事件
- ECU部分/快速启动,仅包含有限功能,之后由应用决定其他功能启动顺序
- ECU以最快速度仅启动必须功能并运行RTE执行某些SWC的功能,然后再启动其他BSW模块以及其他SWC
- 除了一般意义上定义的RUN状态(完全操作),还可以定义其他状态
- 多核ECU:ECU所有核之间启动,关闭,睡眠,唤醒状态的协同操作
EcuM模块的阶段
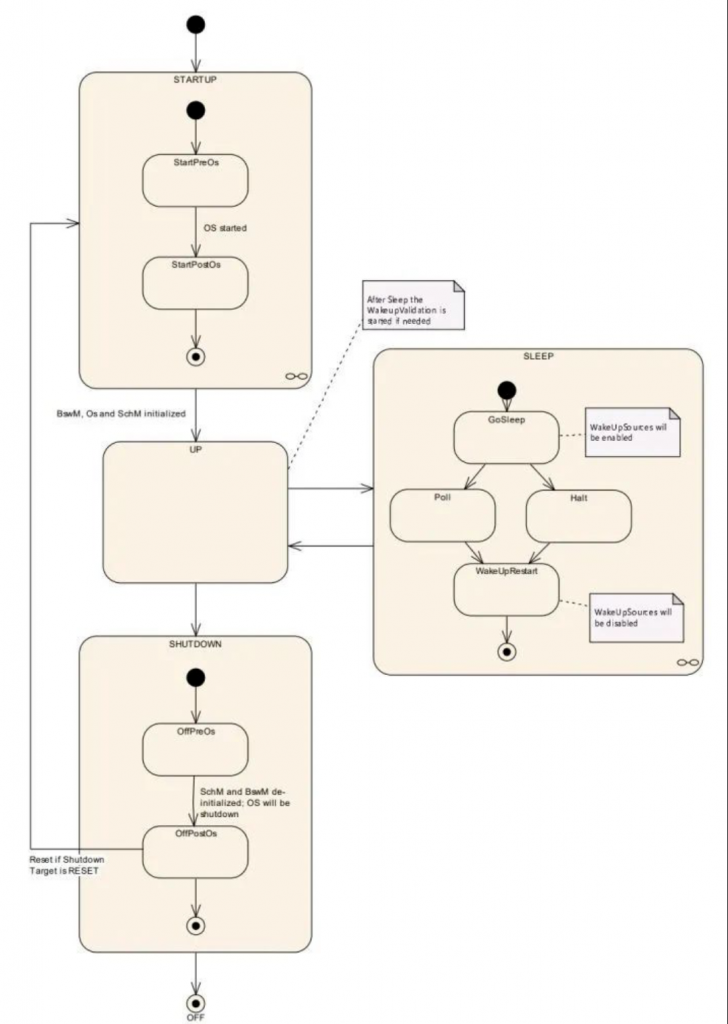
启动(STARTUP)阶段持续到模式管理运行起来。一般地,启动阶段包括最小运行需求,例如初始化底层驱动,启动OS,初始化BSW调度表以及BswM模块,这样才能满足最低需求以进行模式管理。关闭(SHUTDOWN)阶段的操作则与之相反。
运行(UP)阶段包括所有未强调的状态,在这个阶段中,根据集成工程师定义的状态机,ECU从一个状态(State)迁移到另一个状态,或是从一个模式(Mode)转移到另一个模式。
当然,这里会有一个疑问——这个State和Mode怎么理解。一般来说,当我们提到State时,是指BSW模块内部的状态,可以构成BSW的状态机,这些状态对于应用来说是不可见的。而Mode,则是包括但不仅限于EcuM等状态机的一组状态,和应用或者整车直接相关(PS. AP的EM/SM有类似的概念)。
运行阶段也可能会包含一些前置睡眠状态,比如还未完全进入睡眠状态时,提前使能唤醒源。
启动阶段
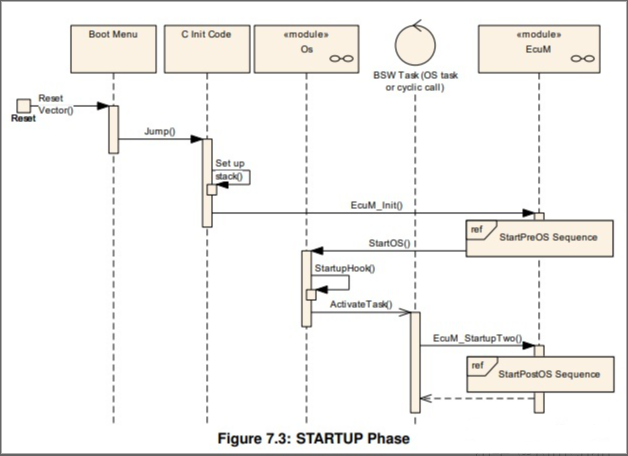
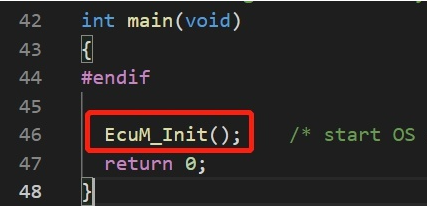
main函数执行之前的启动代码本文暂不进行详细说明,一般都是MCU的栈初始化,变量初始化等,满足代码能够执行的条件即可。
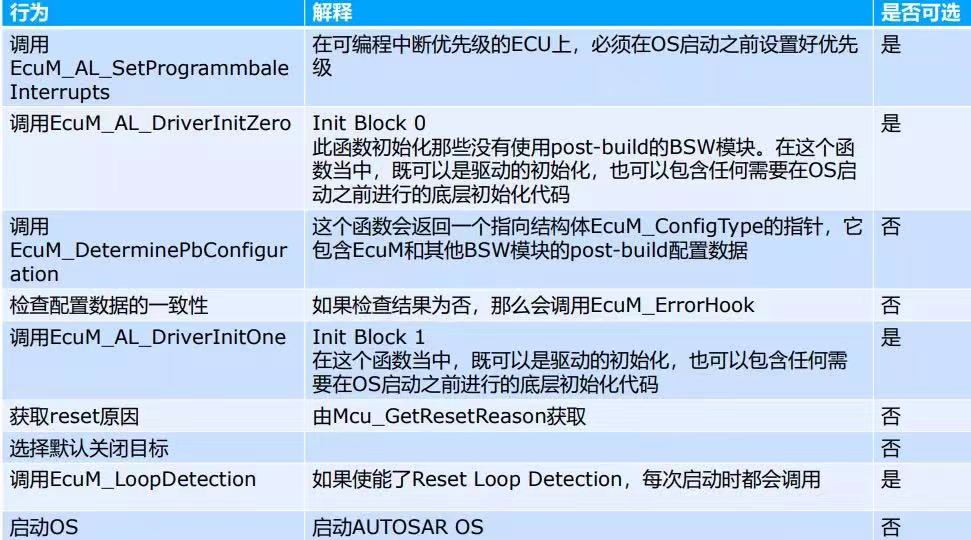
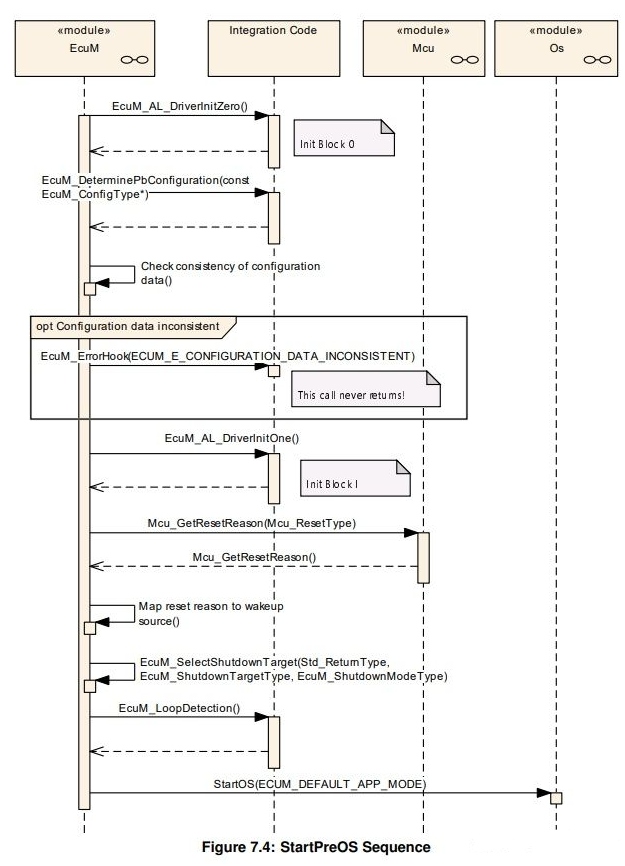
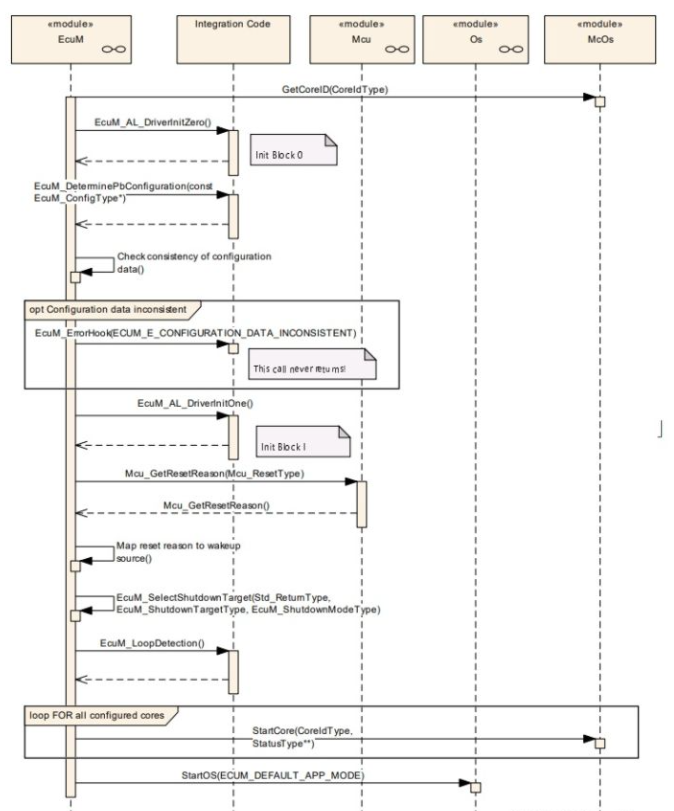
当调用到EcuM_Init()时,EcuM开始接管ECU启动过程,并进行StartPreOS的操作:
StartPreOS阶段

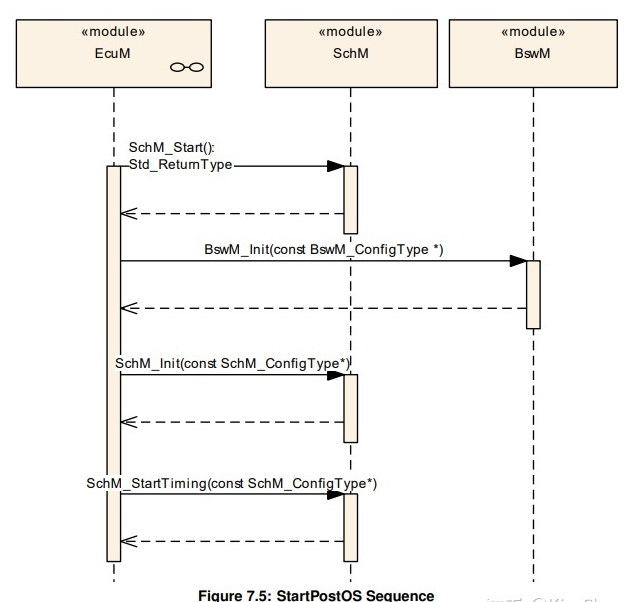
StartPostOS阶段
运行阶段
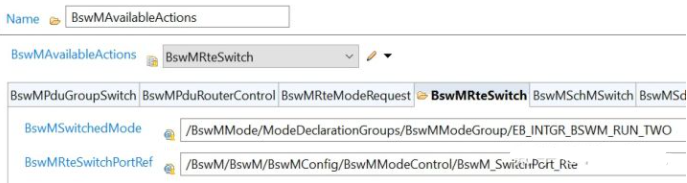
接下来,BswM会根据我们配置的Action List执行响应动作,例如读取NvM,启动Rte等,
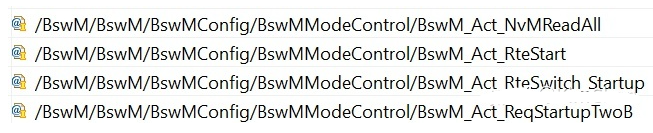
此后,由于还请求了Startup Two B,因此会接着执行其他模块的初始化,例如ComM,Dem,Xcp模块等。
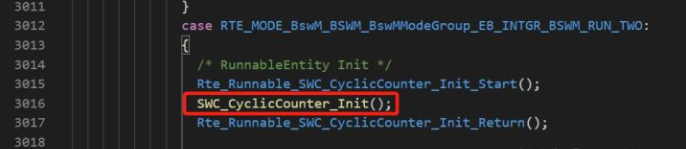
既然Dem模块初始化了,此时我们可以开始启动Operation Cycle状态了,例如:
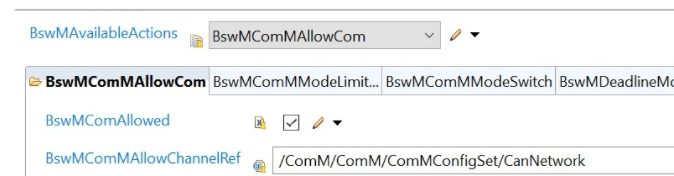
设置通信允许动作:
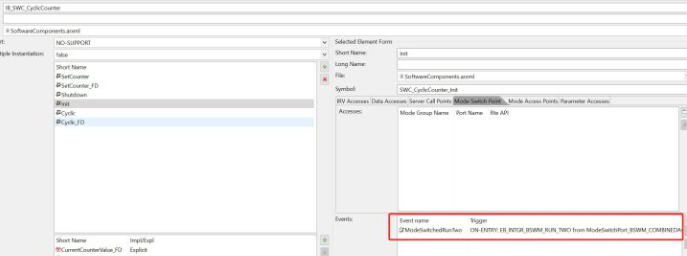
FULL COMMUNICATION的问题
当SWC初始化时,由于后续SWC中runnable有通信的需求,所以这里进行了ComM_RequestComMode的调用。
似乎本文到此为止都还没有提到这个,很高兴地祝贺你,你对通信启动的过程已经非常熟悉。
由于项目需求的不同,并不限定一定用何种方式请求通信。无论是在ComM文章里提到的那样,由SWC去主动调用请求ComM User的接口,
都可以。
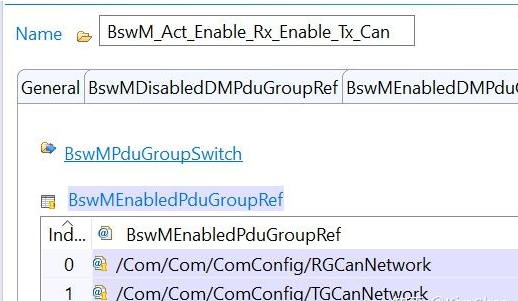
当然,别忘了设置进入FULL COMMUNICATION状态时,还要使能对应的Pdu Group。
SHUTDOWN阶段
当ECU需要关闭或者重启的时候,EcuM会进入到SHUTDOWN阶段。
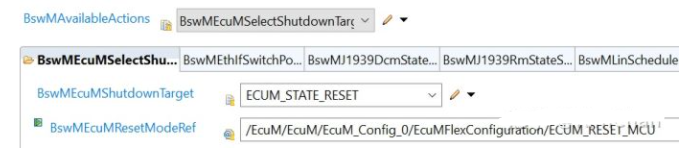
我们以Dcm模块0x11服务请求reset为例,我们会设置EcuM Shutdown Target为RESET以及请求进入prepare-shutdown的call-out:
当进入到Prepare Shutdown的状态,此时你需要通知Rte这个状态的变化,停止Dem Operation Cycle,关闭(de-init) Dem模块,停止Rte,写入NvM数据等,并请求进入offPreOS的状态。
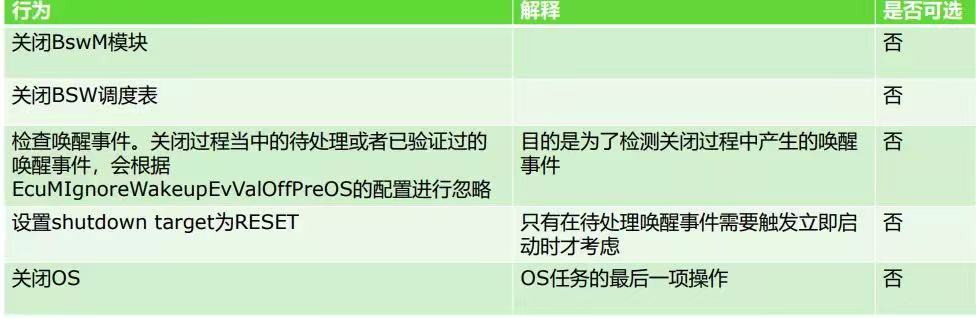
在OffPreOS状态,根据规范,你需要做这些事情:
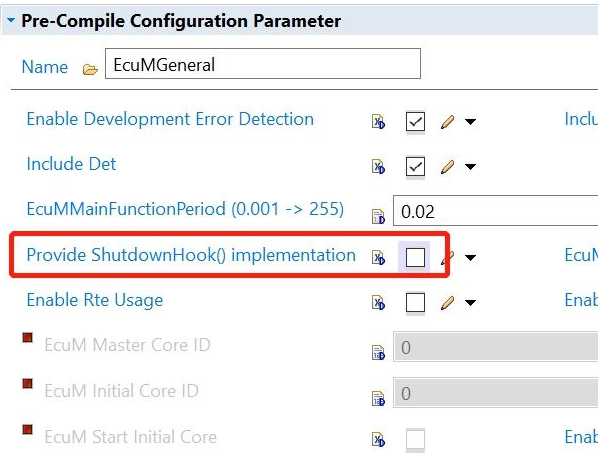
OS关闭之后,会调用hook函数(需要在EB tresos中开启对应功能,或者集成代码中实现对应函数),
在这个hook函数当中,会首先调用EcuM_OnGoOffTwo(),内容由项目需求决定。
再然后根据之前选择的shutdown target来判断执行下一个动作,重启或者关闭:
SLEEP阶段
当ECU不需要通信时,可以进入睡眠模式以低功耗模式运行,此时需要设置EcuM Shutdown Target为SLEEP,
此时也需要设置条件,也能进入Prepare Shutdown状态,通知Rte这个状态的变化,停止Dem Operation Cycle,关闭(de-init) Dem模块,停止Rte,写入NvM数据等。
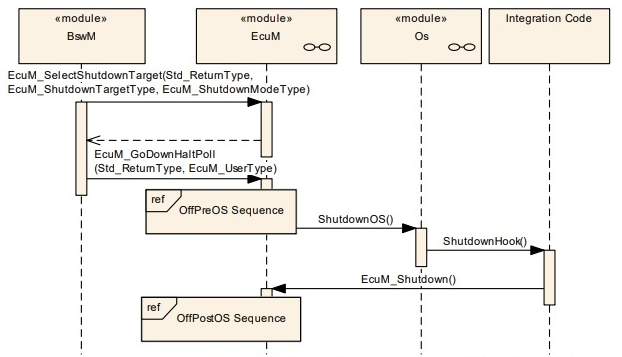
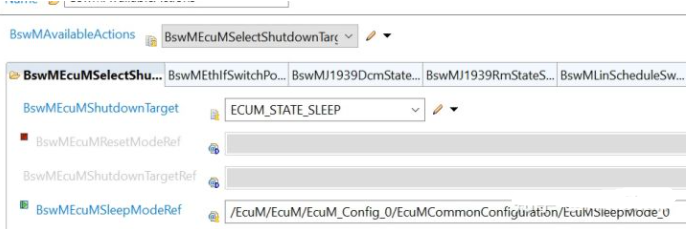
直到选择Go Down还是Go Poll前,操作都和刚才说明的关闭操作一样,由于我们现在选择的shutdown target是sleep,所以会执行EcuM_GoPoll或者EcuM_GoHalt函数。
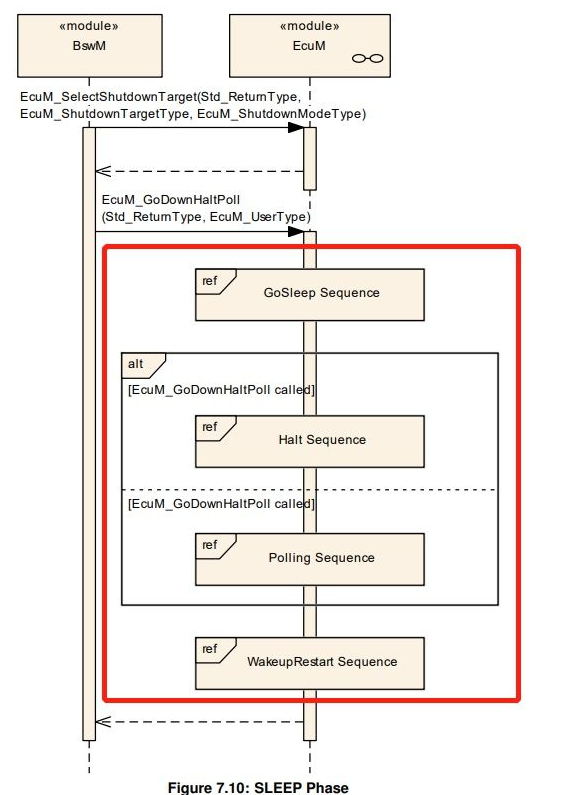
上图红框即我们接下来要执行的动作,
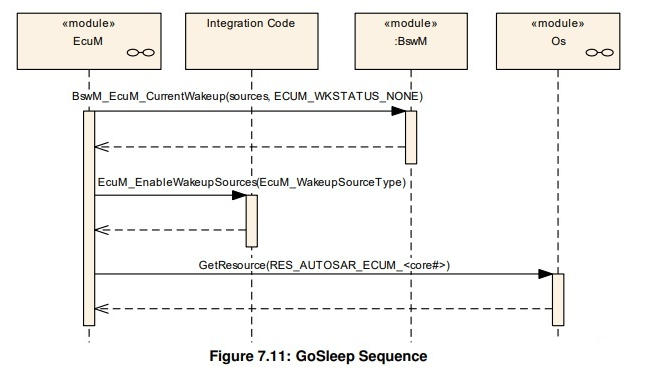
首先进行Go Sleep操作,简单来说就是状态通知以及打开唤醒源。
唤醒过程
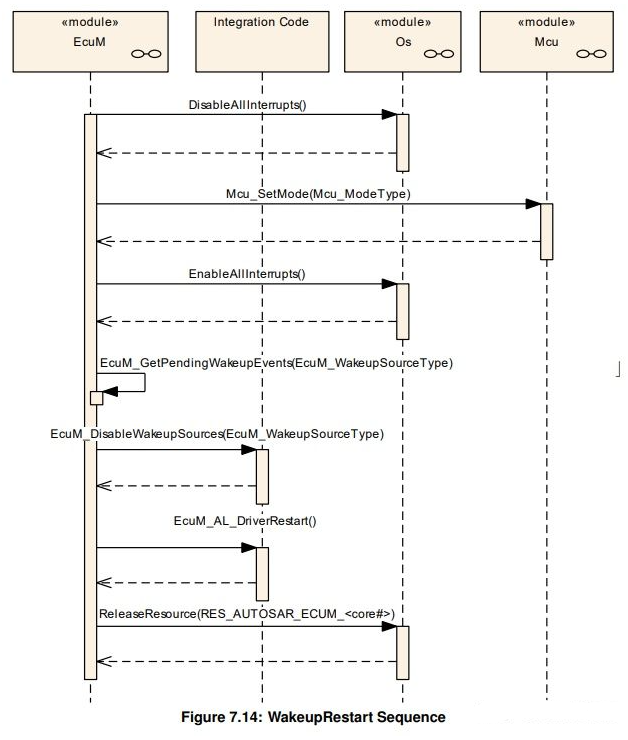
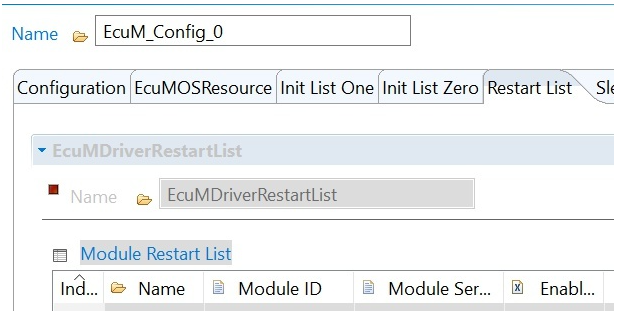
首先设置MCU状态为normal状态,然后关闭唤醒源,如果有设置唤醒时需要重新初始化的驱动,则会调用EcuM_AL_DriverRestart()。
多核中的EcuM
不同于每一个Partition都需要有一个BswM实体,每个core上有一个Partition上跑OS和EcuM就可以了。
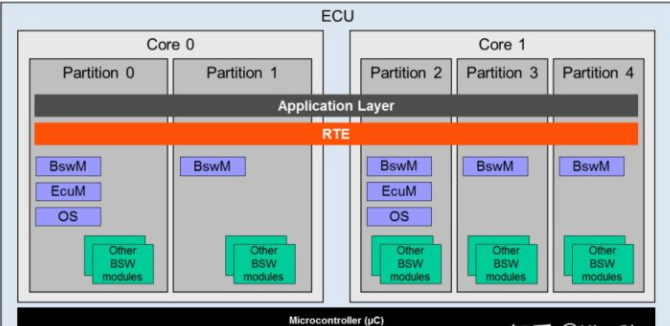
多个核中有一个是主核,主核上的EcuM初始化后,接着启动其他核上的“卫星”EcuM。每一个EcuM都会启动本地的OS以及对应的BswM实体。
如果每个核上运行的是同一个EcuM,那么EcuM在执行时需要知道它运行在哪个核上,做出相应的逻辑动作。
相关产品:
经典 AUTOSAR基础软件、汽车操作系统和量身定制的工具环境: EB tresos
下载评估版:
免费试用EB tresos配置符合 AUTOSAR 标准的软件(支持Infineon AURIX TC38XQ和Renesas RH850/F1KM)
相关培训:
成功案例:
- 软件定义汽车:Elektrobit为大众ID. 提供全新车辆基础设施架构
- Elektrobit的AUTOSAR以太网解决方案将增强版Super Cruise驾驶辅助技术引入全新款凯迪拉克Escalade
相关新闻:
- Elektrobit支持BlackBerry QNX OS构建基于HPC的车辆架构
- Elektrobit为芯驰科技汽车 SoC 芯片提供 AUTOSAR 软件
- 黑芝麻智能宣布支持Elektrobit的AUTOSAR经典平台软件,打造更安全的自动驾驶解决方案
作者:

陈谦
Elektrobit中国团队的软件工程师
专注于Classic AUTOSAR